Výsledky - Experimentálne (laboratórne) pracoviská a elektronické návody na praktické cvičenia
Pracovisko nízkopríkonových mikroradičov a signálových procesorov TEXAS INSTRUMENTS
Pracovisko bolo realizované v pedagogickom laboratóriu B004, následne v ZS 2015/2016 v pedagogickom laboratóriu D106, ÚAMT, FEI STU. Upravené pracoviska slúžia na výuku nízkopríkonových mikroradičov v predmete: Vývojové programové prostredia pre mechatronické systémy (I-VPPMS-ZS 2015/2016-FEI). Pozostávajú s piatich pracovných staníc PC s príslušenstvom a s piatimi špeciálnymi prípravkami na báze nízkopríkonového mikroradiča MSP430 od TEXAS INSTRUMENTS. Programové vybavenie bolo dodané bezplatne v rámci dlhodobej spolupráce s Europským školiacím pracoviskom Texas Instruments.
Študenti v rámci výučbového procesu sa oboznámia s technickým vybavením vývojových pracovísk a v rámci praktických cvičení sa naučia postupne ovládať celú radu periférnych zariadení prostrednictvom programovacieho jazyka C a vývojového prostredia TI CCS – Code Composer Studio. Podpora Europského univerzitného programu TI umožnila aj rozbehnutie celej rady aplikácii v rámci študentských projektov v rámci diplomových prác. Jednou z prác je snímanie obrazu pomocou nízkopríkonového mikroradiča MSP430 a následne jeho sériový prenos dát. Kamerový systém je polohovaný prostredníctvom polohovacích servosystémov, ktoré sú aktívne len pri zameraní sa na snímaný objekt. Inak sú v nečinnosti, čo umožňuje podstatné zníženie príkonu celého zariadenia. Samotný riadiaci procesor je aktívny len v režime snímania, polohovania a prenosu dát, inak prechádza do nízkopríkonového módu, čo umožňuje celému systému snímania obrazu vydržať na jedno nabitie batérie čo najdlhšie. Samotné zariadenie je možné priebežne dobíjať prostredníctvom solárnych článkov. Podrobnosti o riešení tejto problematiky sú publikované na medzinárodnej vedeckej konferencii KIT 2015
Riešiteľ: doc. Ing. Peter Fuchs, PhD; Ing. Igor Jakubička; Ing. Vladislav Bača
Fotky z pracoviska{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Pracovisko mikrosystémov a MEMS
Stavebnicové experimentálne pracovisko na trénovanie systémovej integrácie prvkov vytvorených mikrosystémovými technológiami obsahujúcich hardvérové a softvérové prostriedky spojené do embedded systémov, napr. modulové inteligentné mikrosenzory.
V roku 2105 boli zakúpené prvé komponenty vytvárajúce moduly pre prvky s MEMS technológiam, prehľad je v tabuľke 1. Počas roku 2016 bolo riešené pripojenie komponentov k existujúcim riadiacim jednotkám, ich programová obsluha a vizualizácia meraní. Po odstránení technických problémov a zdokonalení programového vybavenia bude pracovisko modifikované na základe získaných skúseností a skompletované.
| Počet | Názov komponentu |
|---|---|
| 2x | Komponenty na meranie signálov Parallax PropScope USB |
| 5x | Vývojová doska XTRINSIC-SENSORS-EVK |
| 5x | Vývojová doska X-NUCLEO-IKS01A1 |
Pracovisko umožňuje programovať, meniť a merať základné charakteristiky senzorov, vizualizovať na študentskom PC prípadne pomocou dataprojektora aj pre väčšiu skupinu vizualizovať v reálnom čase priebehy dôležitých signálov (PropScope).
| veličina | senzor | opis | rozsah |
|---|---|---|---|
| tlak | MPL3115A2 | precízny snímač tlaku | 20 – 110 kPa |
| magnetické pole | MAG3110 | 3-osí magnetometer | ±1000 µT |
| zrýchlenie, poloha | MMA8491Q | 3-osí Low-g akcelerometer | ±8g / ±45 deg. |
| zrýchlenie rotácia | LSM6DS0 | 3-osí akcelerometer s integrovaným gyroskopom | ±2/±4/±8 g ±245/±500/±2000 dps |
| magnetické pole | LIS3MDL | 3-osí magnetometer | ±4/ ±8/ ±12/ 16 gauss |
| tlak | LPS25HB | digitálny barometer a snímač absolútneho tlaku | 260-1260 hPa |
| teplota rel. vlhkosť | HTS221 | kapacitný snímač teploty a relatívnej vlhkosti | -40 °C – +120 °C 0 – 100% RH |
Riešiteľ: Ing. Richard Balogh, PhD.
Fotky z pracoviska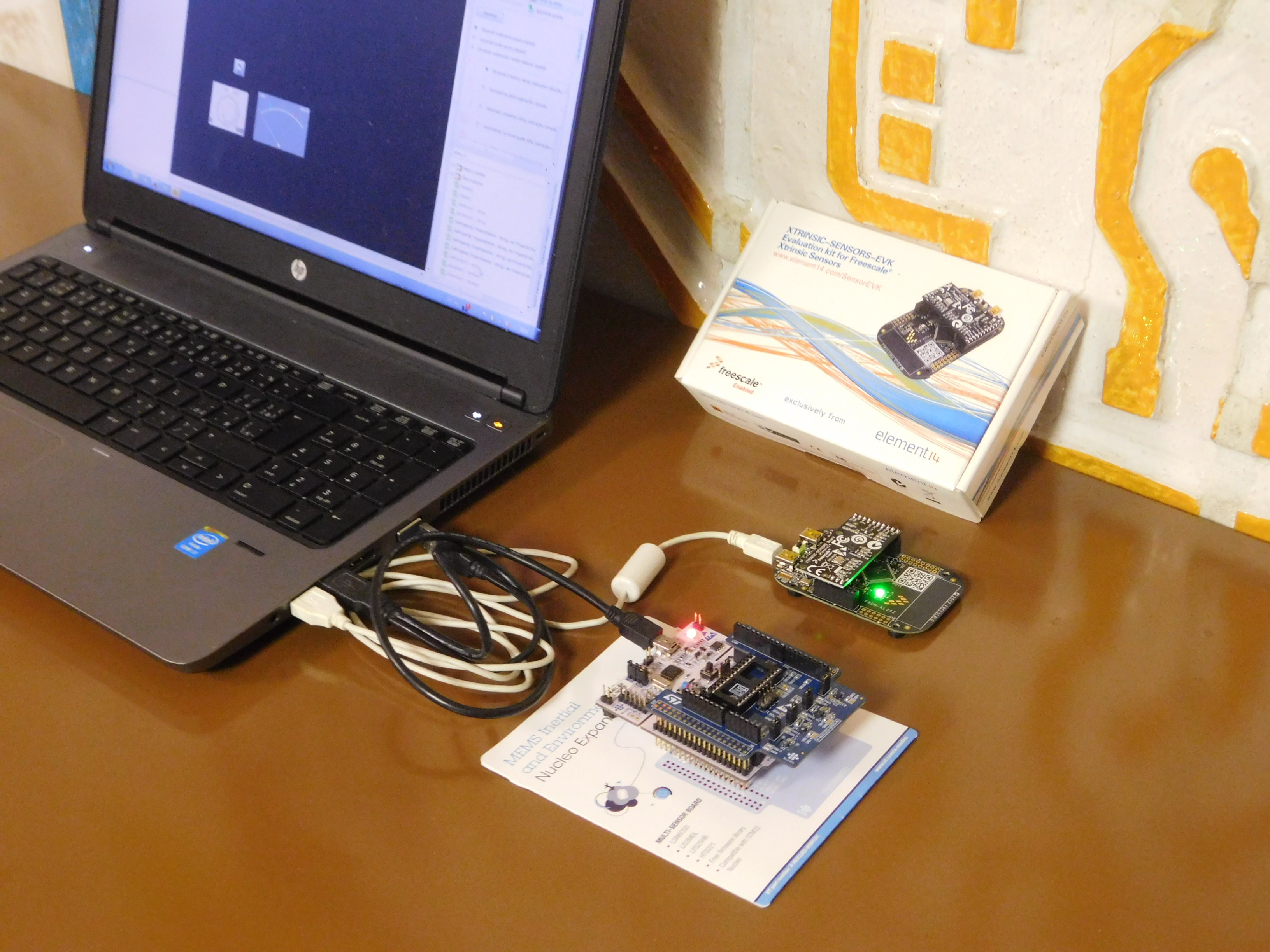{kind=link}
Experimentálne pracovisko pre ovládanie elektrického ventilu.
Pre potreby výučby predmetu senzorové systémy a aktuátory vznikla potreba vyhotoviť zariadenie na zmenu polohy elektricky poháňaného ventilu. Elektrický ventil má dva motory, každý pre jeden smer (otváranie, zatváranie). Zmena polohy sa realizuje privedením sieťového napätia 230V na jeden resp. druhý motor.
Vyhotovené zariadenie na ovládanie zmeny polohy pozostáva zo silovej časti a ovládacej logiky. Silová časť zabezpečuje prívod sieťového napätia do zdroja, ktorý transformuje napätie pre potrebnú elektroniku. Zároveň silová časť privádza sieťové napätie na dvojicu relé, ktoré sú ovládané pomocou ovládacej logiky. Ovládacia logika zabezpečuje vyhodnotenie stavu tlačidiel na ovládacom panely zaradenia, ošetruje prípadné nežiadúce stavy a vysiela želaný stav do relé. Logika zariadenia je postavená na platforme arduino, čo umožňuje jednoduché preprogramovanie zariadenia, možnosť vzdialeného ovládanie prostredníctvom uart, alebo vyhodnotenie informácie o polohe ventilu prostredníctvom spätnej väzby ventilu.
Riešiteľ: Ing. Michal Kocúr, PhD
Fotky z pracoviska{kind=link}
Pedagogické pracovisko pre systém Eplan
Medzi vyžadované kompetencie absolventov študijného programu Aplikovaná mechatronika a elektromobilita zaiste patrí aj čítanie a vytváranie elektrotechnických výkresov a projektovej dokumentácie v elektrotechnike. Tieto kompetencie môžu študenti nadobudnúť v predmete CAD systémy a projektovanie mechatronických systémov.
Na podporu výučby tohto predmetu podľa aktuálnych štandardov a postupov v praxi bolo laboratórium vybavené moderným softvérom EPLAN Electric P8, ktorý patrí medzi neprepracovanejšie a najpoužívanejšie softvéry v tomto segmente. P8 je prepojený s portálom DataPortal, ktorý obsahuje súčiastky a zariadenia priamo od výrobcu, čo razantným spôsobom urýchľuje proces vytvárania projektovej dokumentácie. V rámci akademickej licencie nám spoločnosť EPLAN poskytla tento softvér zadarmo s podmienkou účasti na školení v školiacom centre v Malackách. Ďalej bolo potrebné vytvoriť počítačovú sieť so serverom, kde je nainštalovaný licenčný server, ktorý distribuuje licencie v sieti pre 6 aktívnych staníc. Študenti si v rámci spomínanej licencie môžu na obmedzený čas (1 rok) nainštalovať P8 aj na svoje PC prípadne laptopy. Študenti po úspešnom ukončení predmetu môžu získať certifikát o absolvovaní kurzu.
Okrem softvéru Eplan Electic P8 bolo laboratórium vybavené v rámci akademickej licencie aj softvérom EPLAN Harness ProD, ktorý je učený na vývoj a návrh káblových zväzkov elektrotechnických zariadení v 3D prostredí.
Riešiteľ: Ing. Michal Kocúr, PhD
Fotky z pracoviska{kind=link}
{kind=link}
{kind=link}
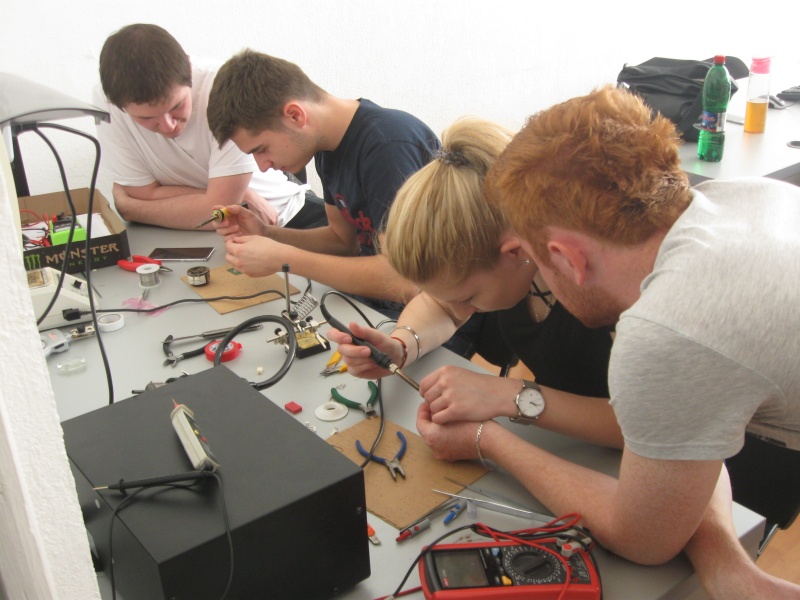
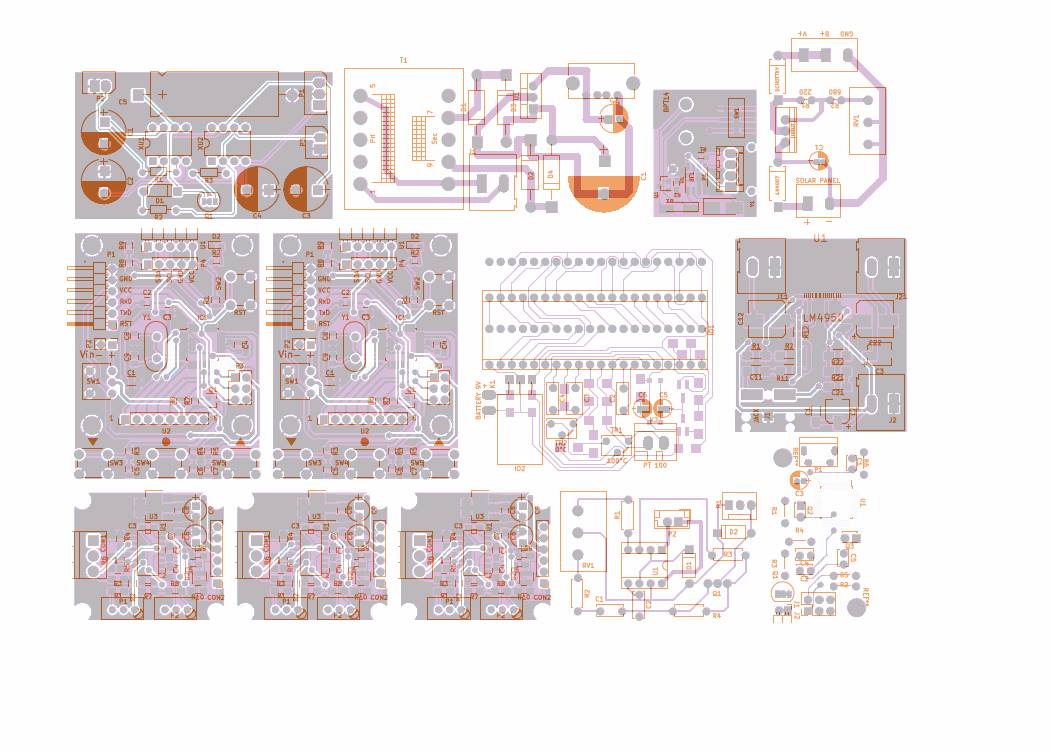
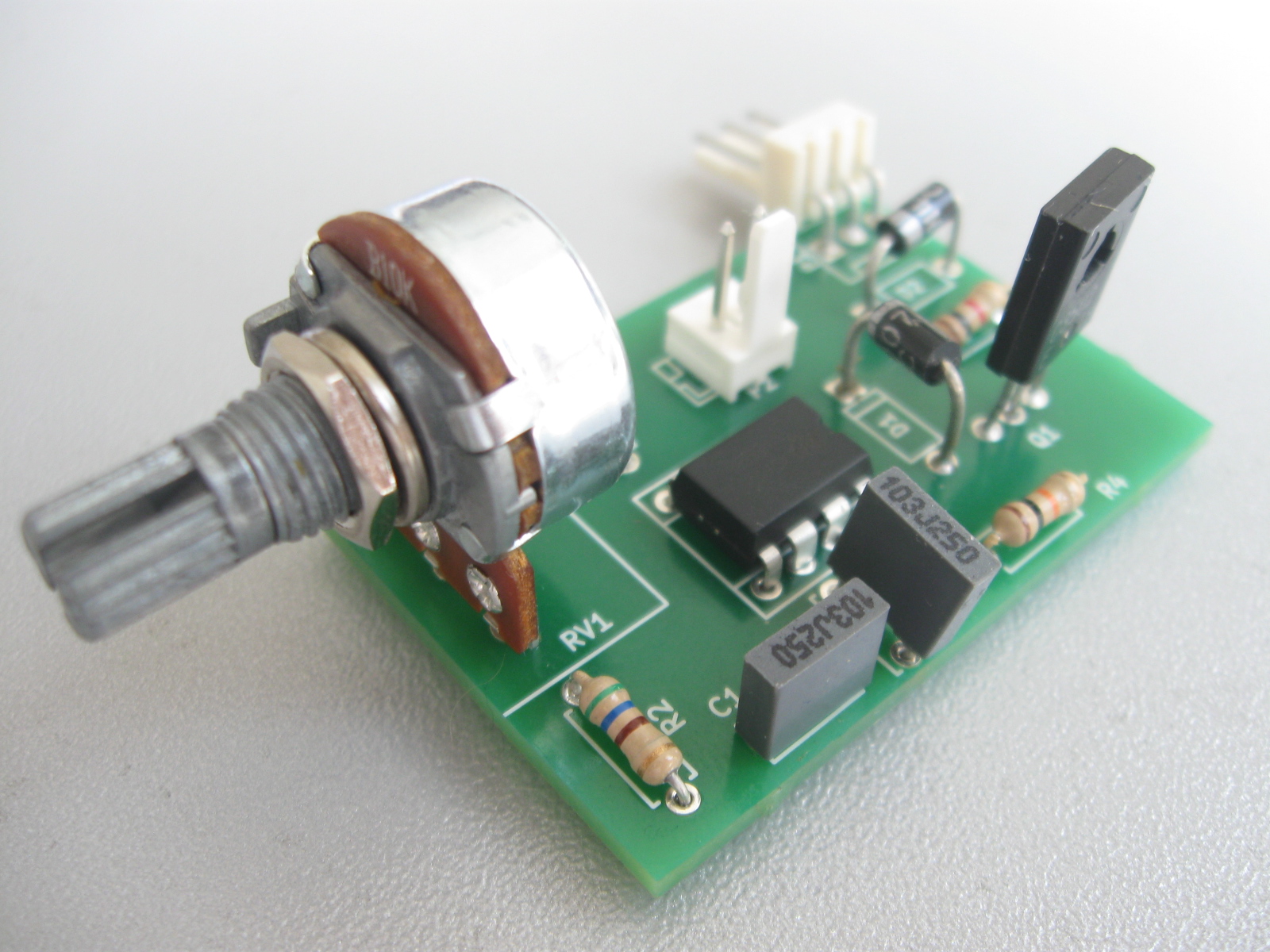
Laboratórne pracovisko - Návrh a výroba dosiek plošných spojov (DPS)
V rámci predmetu NAVEZ – Návrh elektronických zariadení sme študentov naučili pracovať s návrhovým open source systémom KiCAD pričom v priebehu semestra prešli celým cyklom od samotného návrhu a simulácie, cez kreslenie schém, vkladanie a generovanie technických informácií pre výrobu, dodávateľov komponentov, generovanie objednávok zoznamu súčiastok až po návrh a generovanie technologických dát pre výrobu samotného plošného spoja. Cvičenia boli zakončené skutočnou reálnou výrobou navrhnutých plošných spojov pre daný projekt. Študentské projekty boli limitované rozmermi a plošné spoje sme vyrobili hromadne, pričom nám dodávateľ Printed s.r.o. poskytol školskú zľavu vo výške 50% voči štandartným cenám.
Na záver museli študenti vyrobené dosky plošných spojov osadiť súčiastkami a oživiť. Niektoré vybrané projekty dokonca postúpili až do fázy návrhu krabičky pre zariadenie a jej následnej tlače na 3D tlačiarni.
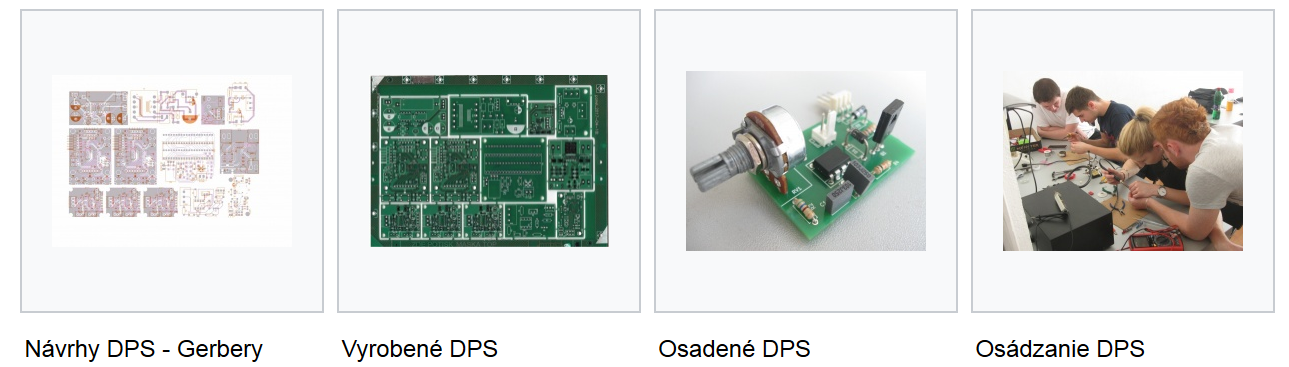
Celý postup návrhu je opäť zdokumentovaný a podkladové súbory sú prístupné na stránke senzor.robotika.sk Ukážky hotových výrobkov su zobrazené v galerií
Riešiteľ: Ing. Richard Balogh, PhD.
Fotky z pracoviska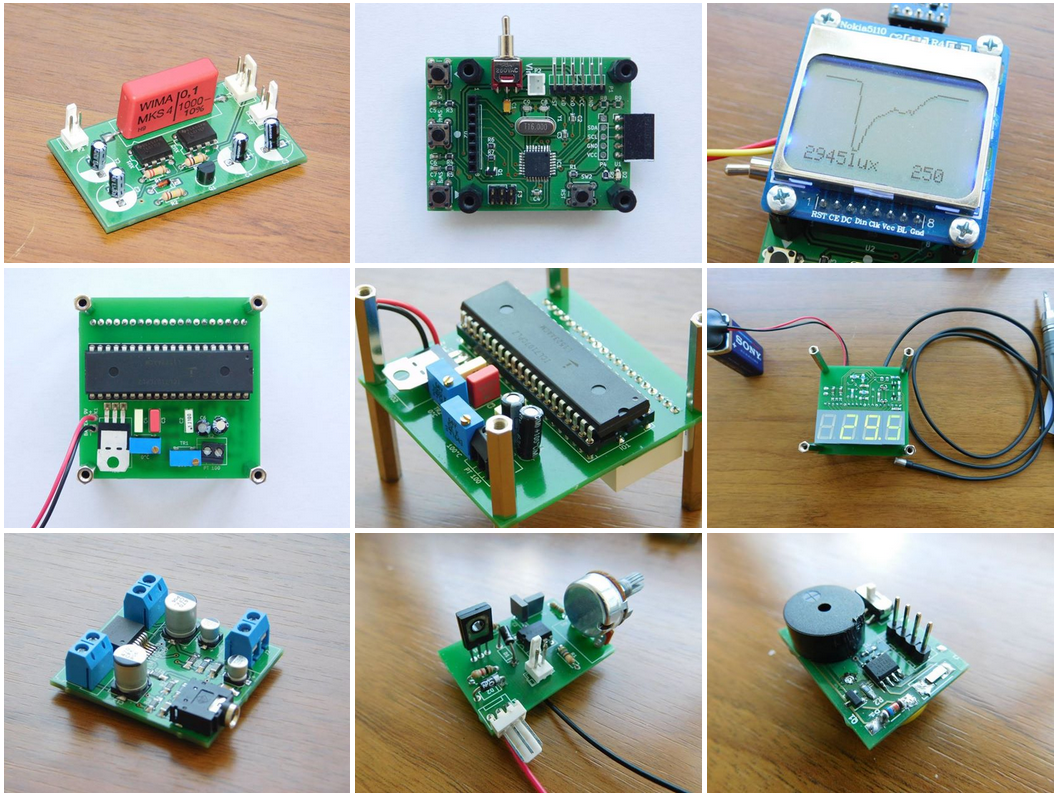{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Pracovisko trakčných pohonov
Pracovisko bolo kompletne vybudované v rámci riešenia projektu.
Využitie pracoviska
Pracovisko bude využívané na výuku v predmete Servopohony pre mechatronické aplikácie. Študenti sa na ňom naučia:
- konfigurovať nízkovýkonový trakčný pohon
- navrhovať algoritmy regulácie rýchlosti trakčného pohonu
Opis pracoviska
Pracovisko pozostáva z dvoch jednosmerných motorov s elektronickým komutátorom (BLDC) typu HPM 3000, ktorých hriadele sú mechanicky prepojené remeňom. Jeden motor je riadený a druhý zaťažovací. Na svorky statorového vinutia zaťažovacieho motora M2 sú pripojené výkonové zaťažovacie odpory Rb, ktoré spôsobujú, že pri otáčaní rotora zaťažovací motor brzdí riadený motor. Riadený motor M1 je napájaný z výkonovej riadiacej jednotky VRJ typu VEC240. Vstupom riadiacej jednotky je žiadaný moment motora a smer otáčania. Tieto dva riadiace signály môže používateľ zadávať manuálne pomocou prepínača a pedálu na ovládacom paneli OP, alebo z externej riadiacej jednotky ERJ (osobný počítač). Pohon je napájaný zo sieťového napájacieho zdroja SNZ.
Riešiteľ: Ing. Igor Belai, PhD
Fotky z pracoviska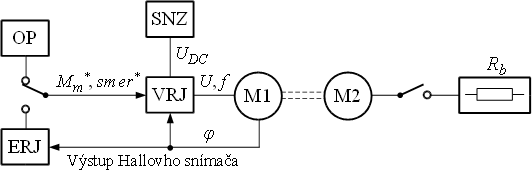{kind=link}
Experimentálne pracovisko servopohonov
Technické vybavenie pracoviska bolo zabezpečené z iných projektov. V rámci projektu KEGA bolo navrhnuté grafické používateľské prostredie na vykonávanie čiastočne automatizovaných experimentov na overovanie vlastností polohových servopohonov.
Využitie pracoviska
Pracovisko bude využívané na výuku v predmete Servopohony pre mechatronické aplikácie. Študenti ho využijú pri výuke algoritmov riadenia servopohonu s generátorom momentu.
Opis pracoviska
Pracovisko pozostáva z dvoch servomotorov, ktorých hriadele sú mechanicky prepojené tuhou spojkou. Jeden motor je riadený a druhý zaťažovací. Vstupom oboch pohonov je žiadaný moment motora. Riadiace signály pohonov sú generované pomocou V/V karty v osobnom počítači. Riadiaci algoritmus je implementovaný v MATLABe.
Riešiteľ: Ing. Igor Belai, PhD
Fotky z pracoviska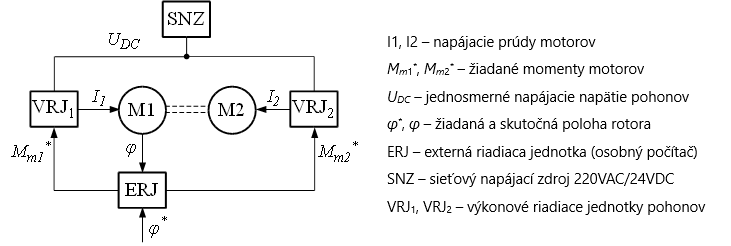{kind=link}
Laboratórne pracovisko - Komunikácia na zbernici CAN
Na výučbu princípov komunikácie na zbernici CAN boli zakúpené komunikačné moduly 8 ks USB2CAN. K týmto modulom dodáva ich výrobca aj základné programové vybavenie umožňujúce odosielanie a prijímanie správ.
Pracoviská umožňujú konfigurovať komunikáciu CAN, zostavovať odosielaný a analyzovať prijatý telegram. Pomocou osciloskopu bude možné pozorovať signály na úrovni fyzickej vrstvy.
Využitie modulov USB2CAN
Moduly USB2CAN umožňujú štandardné pripojenie k PC pomocou USB a budú využité pri výučbe na cvičeniach z predmetu Komunikačné systémy a siete už v LS 2018.
Riešiteľ: Doc. Ing. Peter Drahoš, PhD; Ing. Igor Belai, PhD.
Fotky z pracoviska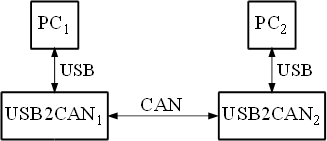{kind=link}
Laboratórne pracovisko pre predmet Elektronické systémy automobilov - ELSA
Experimentálne pracovisko na elektronických kufríkoch LD EMB
- Merali sme charakteristiky polovodičových prvkov. Dióda, Tranzistor, Optočlen, ...
- Merali sme charakteristiky PWM signálu.
- Pomocou PWM signálu sme riadili jednosmerný motor.
- Merali sme otáčky jednosmerného motora. Vyhodnocovali sme PWM signál.
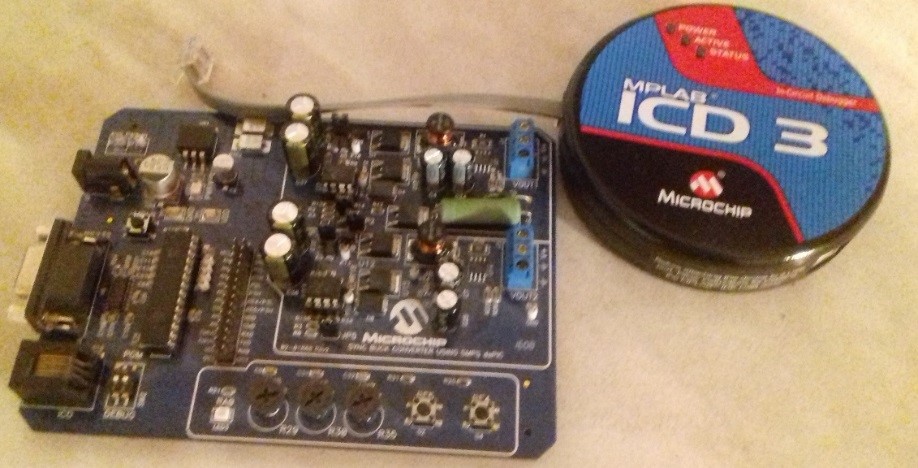
Mikropočítačové pracovisko riadenia jednoduchých led svetiel na báze vývojového kitu Micrchip
Mikropočítačové pracovisko (Microchip) pre riadenie DC-DC meniča.
- Analýza prvkov DC-DC meniča.
- Generovanie PWM signálu pre DC-DC meniče.
- Návrh algoritmu riadenia.
- Kontrola hraničných stavov.
- Meranie charakteristík meniča.
Riešiteľ: Ing. Štefan Chamraz, PhD.
Fotky z pracoviska{kind=link}
{kind=link}
Laboratórne pracovisko strojového videnia
Pracovisko strojového videnia na báze Labview Vision Assistant pre pedagogické účely
Umiestnenie pracoviska sa stanovilo do už existujúcich Združených laboratórií automobilovej mechatroniky Ústavu automobilovej mechatroniky. Toto laboratórium poskytuje dostatok priestoru ako aj výpočtovú techniku vhodnú pre realizáciu pracoviska. Laboratórium obsahuje 8 počítačov, do ktorých bolo nainštalovaný vývojový systém. Problematika strojového videnia je v súčasnosti veľmi aktuálna a praxou žiadaná.
Na 8 počítačov bol na inštalovaný vývojový systém National Instruments LabView a Vision Assistant a Visual Builder. Pre tieto systémy má univerzita ako aj fakulta predplatené voľné licencie. Takto je ústav finančne odbremený od finančnej záťaže za licencie. Systémy od National Instrumenst sú veľmi v praxi rozšírené a to aj v automobilovom priemysle. Dôkazom je aj skutočnosť, že firma VW ponúka diplomové práce s riešením práve problematiky strojového videnia. Toto je dôkazom toho, že pedagogika problematiky strojového učenia je nutná.
Obsah úloh
Pre pracoviská boli pripravené 2 úlohy, pomocou ktorých študenti získajú prehľad o základných funkciách programu a princípe tvorby skriptov pre spracovanie obrazu pomocou systému NI Vision Assistant.
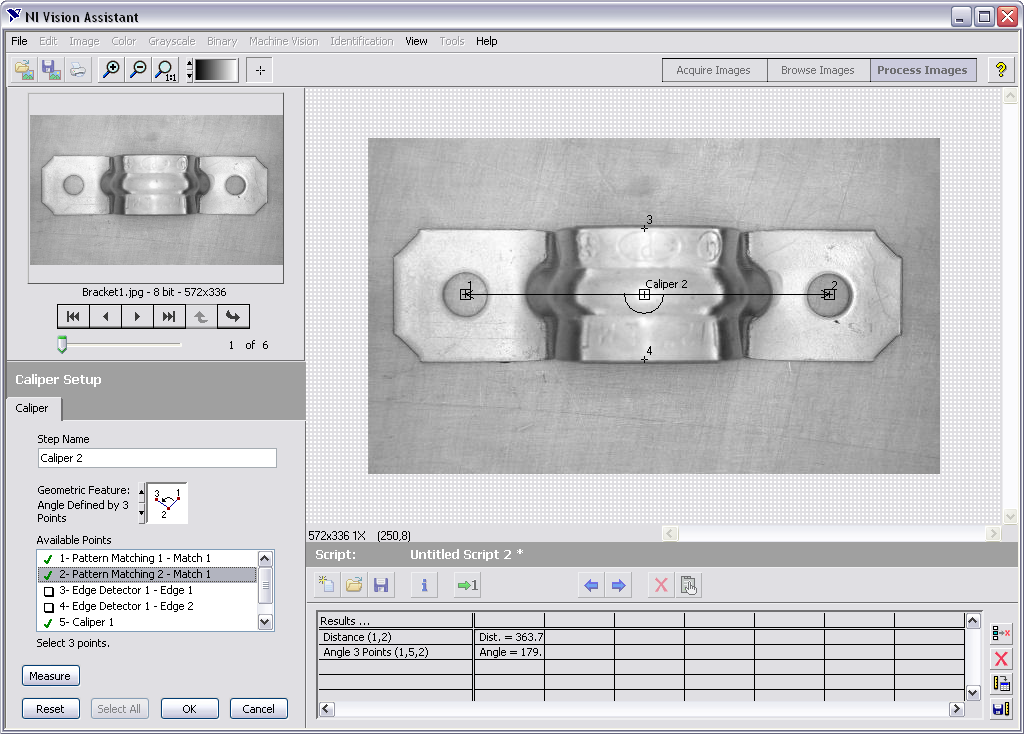
Úloha 1 - Inšpekcia dielov
V tejto úlohe je analyzovaný držiak rúry, či spĺňa požadované parametre (Obrázok 3) . Cieľom je merať uhly a vzdialenosti medzi črtami na držiaku a určiť, či tieto merania vyhovujú v rámci tolerancie. Obrázok ilustruje miery a vyhovujúce rozsahy.
V úlohe sa využíva nástroj Pattern Matching - vyhľadávanie vzorov na nájdenie dier v držiaku. Tieto diery slúžia ako meracie body, z ktorých môžeme určiť či je oblúk držiaku správnej výšky a zakrivenia. Predtým ako môžeme vykonať merania pre zistenie správnych rozmerov držiaku, musíme detekovať hrany, na ktorých bude založené meranie. Edge Detector funkcia nájde hrany pozdĺž priamky, ktorú nakreslíme s Line Tool. Po nájdení dier v držiaku a potrebných hrán môžeme vyrátať stred šírky držiaku, vzdialenosť medzi dierami a uhol ramien držiaku. Caliper funkcia (posuvné meradlo) je nástroj, ktorý používa body v obraze pre kalkuláciu meraní ako vzdialenosti, uhly a stred segmentu alebo plochy. Tieto body sú výsledkom predchádzajúcich procesných krokov ako detekcia hrán či hľadanie vzoru (Obrázok 4). Visual Builder umožňuje dávkové spracovanie - Batch processing, ktoré vykoná skript na zbierke obrázkov. Môžeme použiť toto spracovanie na analýzu viacero obrázkov a uložiť výsledky v súbore.
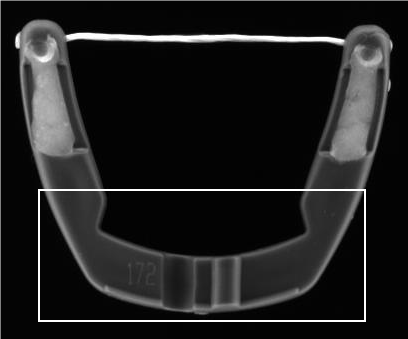
Úloha 2 – Inšpekcia vlákna
V tejto úlohe je popísané, ako nastaviť súradnicový systém a postup ako navrhnúť inšpekciu, ktorá kontroluje prítomnosť dielcov.
V typických inšpekčných úlohách strojového videnia je inšpekcia a spracovanie limitovaná na zvolenú oblasť záujmu (ROI). Pre limitovanie inšpekčnej plochy je potrebné aby sa objekt objavil vždy vnútri definovanej oblasti záujmu ROI.
Ak je kontrolovaný objekt v obraze vždy na rovnakom mieste a rovnakej orientácie, definovanie oblasti záujmu je jednoduché. Často je však objekt v obraze objavuje posunutý alebo zrotovaný. Ak nastane takáto situácia, oblasť záujmu potrebujeme posunúť alebo rotovať s dielcom ktorý kontrolujeme. Na to aby sme oblasť záujmu posunuli a rotovali vo vzťahu s objektom, potrebujeme definovať súradnicový systém vzhľadom na črty v obraze.
Súradnicový systém je špecifikovaný jeho počiatkom a uhlom jeho x osy. Súradnicový systém priradíme na základe toho, akú očakávame polohu objektu v obraze. Ak sa objekt bude hýbať len v horizontálnej a vertikálnej opolohe, potrebujme zvoliť takú črtu, ktorá dokáže reprezentovať počiatok súradnicovej sústavy. Uhol 0 je predvolený. Ak sa objektu bude hýbať aj rotovať, potrebujeme nájsť črtu, ktorá reprezentuje polohu ale aj uhol súradnicového systému.
Problematika strojového videnia predstavuje široko použiteľný a univerzálny nástroj, ktorý sa stal v poslednom období aj ekonomicky dostupným riešením pre množstvo aplikácii. Základné zručnosti, ktoré študenti získali budú užitočné v praxi. Konštatujeme, že táto oblasť bola od študentov prijatá veľmi pozitívne. Na pracovisku sa nachádza priestor na zlepšovanie a v budúcnosti bude obohatený najmä o nové hardvérové prostriedky.
Poznámka: Jednou z úloh projektu KEGA, bola realizácia laboratórneho pracoviska pre strojové videnie. Pôvodným zámer bolo využiť vývojový systém VisionLab pre rozpoznávanie obrazov, naviazané na riadiaci systém ControlWeb. Počas riešenia projektu sa však ukázalo, že prax si žiada iný vývojový systém a to Labview Vision Assistant. Pre tento vývojový systém má navyše STU zakúpenú licenciu, a teda je ho možné neobmedzene využívať vo všetkých laboratóriách. Pre tieto dôvody bolo pracovisko vybudované s iným vývojovým riešením.
Riešiteľ: Ing. Oto Haffner, PhD.
Fotky z pracoviska{kind=link}
{kind=link}
{kind=link}
Laboratórne pracovisko s tenzometrickými snímačmi
Napružnom nosníku z duralu sú nalepené fóliové kovové a polovodičové tenzometre.. Tenzometre na hornej strane nosníka sú namáhané ťahom a tenzometre na dolnej strane nosníka tlakom. V našom prípade maximálna deformácia nosníka je 1 mm. Pracovisko má 6 meracích kanálov z tenzometrických snímačov (mostíkov) vrátane merania poruchovej veličiny – teploty. Teplotu (ohrev aj chladenie) nosníka je možné ovládať pomocou 4 termoelektrických batérií. Ovládanie priehybu nosníka bolo motorizované a umožňuje automatizované meranie charakteristík viacero typov tenzometrov a ich zapojení (plný mostík, polomostík,...).
Riešiteľ: Doc. Ing. Peter Drahoš, PhD.
Fotky z pracoviska Návody na cvičenia 1 Návody na cvičenia 2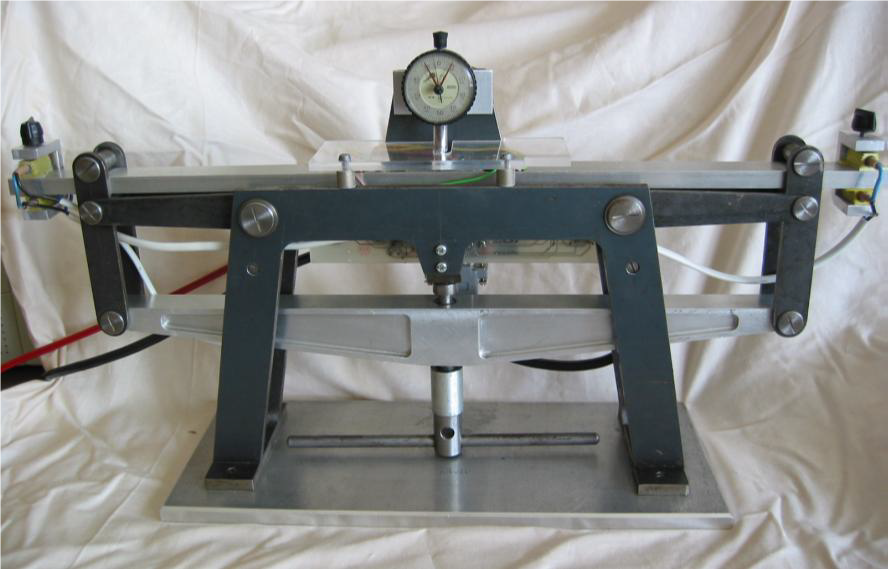{kind=link}
Laboratórne pracovisko - Komunikácia na báze STM32F4 vývojovej dosky
Pre predmet Komunikačné systémy a siete boli vytvorené:
- Štyri laboratórne pracoviská na báze STM32F407VGT dosiek - - ARM Cortex M4, frekvencia 168 MHz, 1 MB Flash pamäte, LCD interface, 3xADC, 2xDAC, 16-stream DMA regulátor, SWD a JTAG interface, SMBus a PMBus, 4x USART, 3xSPI, 2x CAN interfaces, SDIO interface, USB2 port, CRC calculator unit, RTC
- Microsoft Visual Studio 2017 Enterprise, rozsirenie VisualGDB, 4 pracoviska.
Úlohy
Úvod do problematiky, zoznámenie sa s prostredím C, VHDL, datasheety ...
- DMA v ADC – základná komunikácia medzi vnoreným systémom a PC.
- Úvod do FPGA, princíp CRC kódovania, PWM.
- PWM na STM32F4
- Spojenie 2 STM32F4 dosiek pomocou SPI
Riešiteľ: Doc. Ing. Peter Drahoš, PhD; Ing. Ivan Klimo.
Fotky z pracoviska Návody na cvičenia Učebný text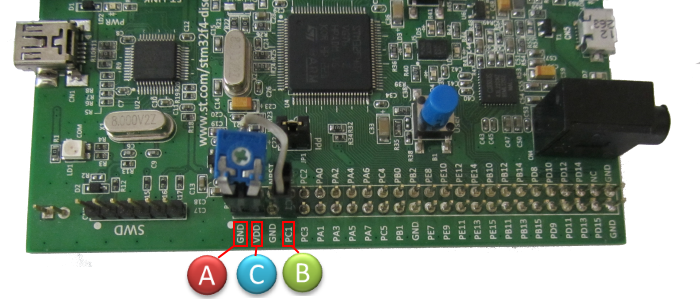{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}