
Cieľom predmetu je naučiť základy kinematiky a dynamiky tuhých telies, zostavovanie pohybových rovníc mechanických a mechatronických sústav. Na ich riešenie sa budú využívať počítačové programy MATLAB/Simulink a MSC.ADAMS.
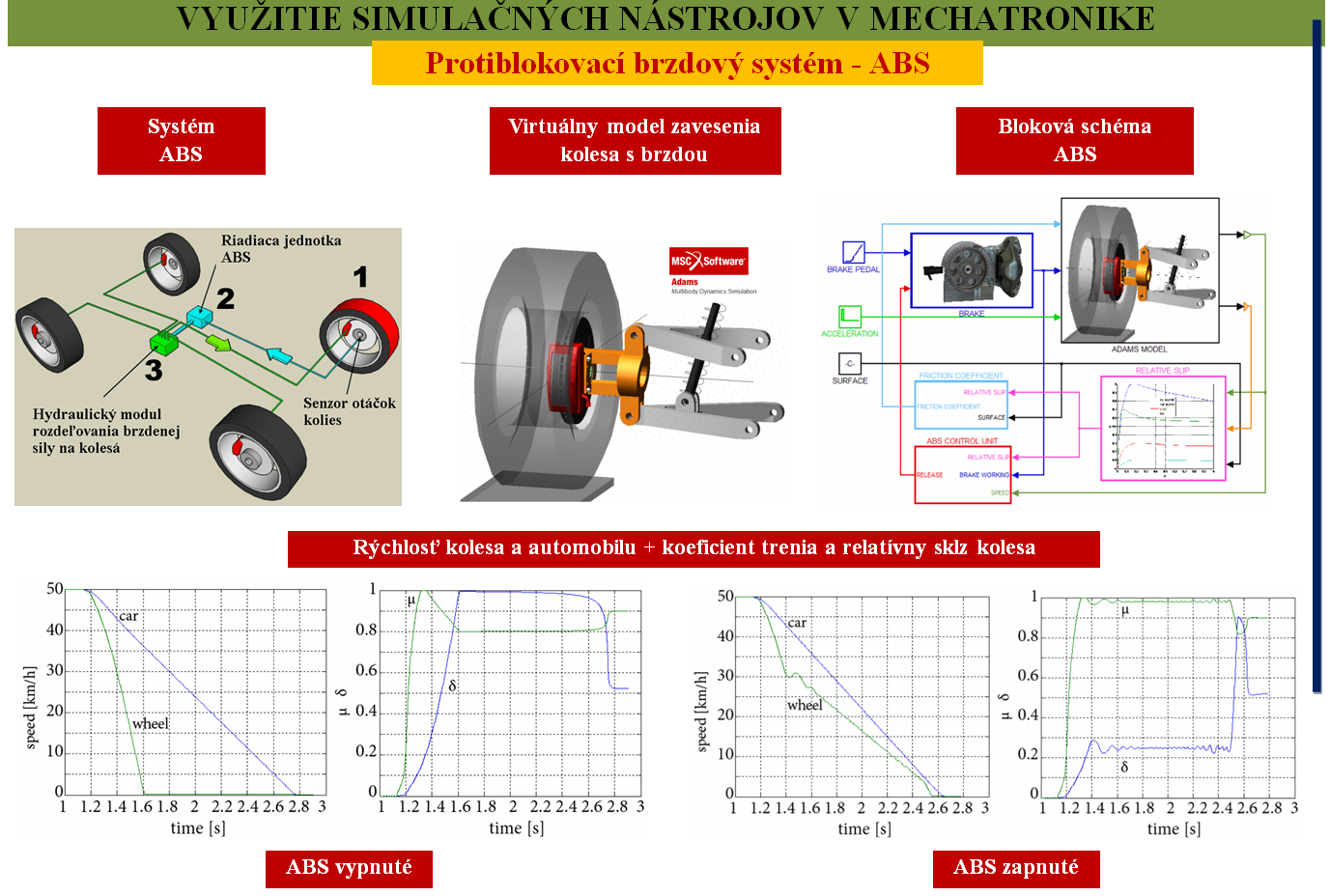
Predmet je zameraný na opis pohybu mechanických a mechatronických sústav a systémov z pohľadu kinematiky a dynamiky. V kinematike je pohyb telies definovaný jeho rýchlosťou alebo zrýchlením, v dynamike je pohyb vyvolaný pôsobením silových účinkov (sila, moment sily). Riešením v oboch prípadoch je určinie zmeny polohy, rýchlosti a zrýchlenia telesa v čase, t.j. za aký čas aký pohyb teleso vykoná, kam sa premiestni, po akej trajektórii sa pohybujú zvolené body telesa, aké sú ich okamžité rýchlosti a zrýchlenia, ako vplýva silové pôsobenie na pohyb telesa a pod. V oblasti mechatronických systémov je práve znalosť zmeny pohybu mechanickej sústavy na silové pôsobenie dôležitým základom k návrhu ich riadenia a regulácie.
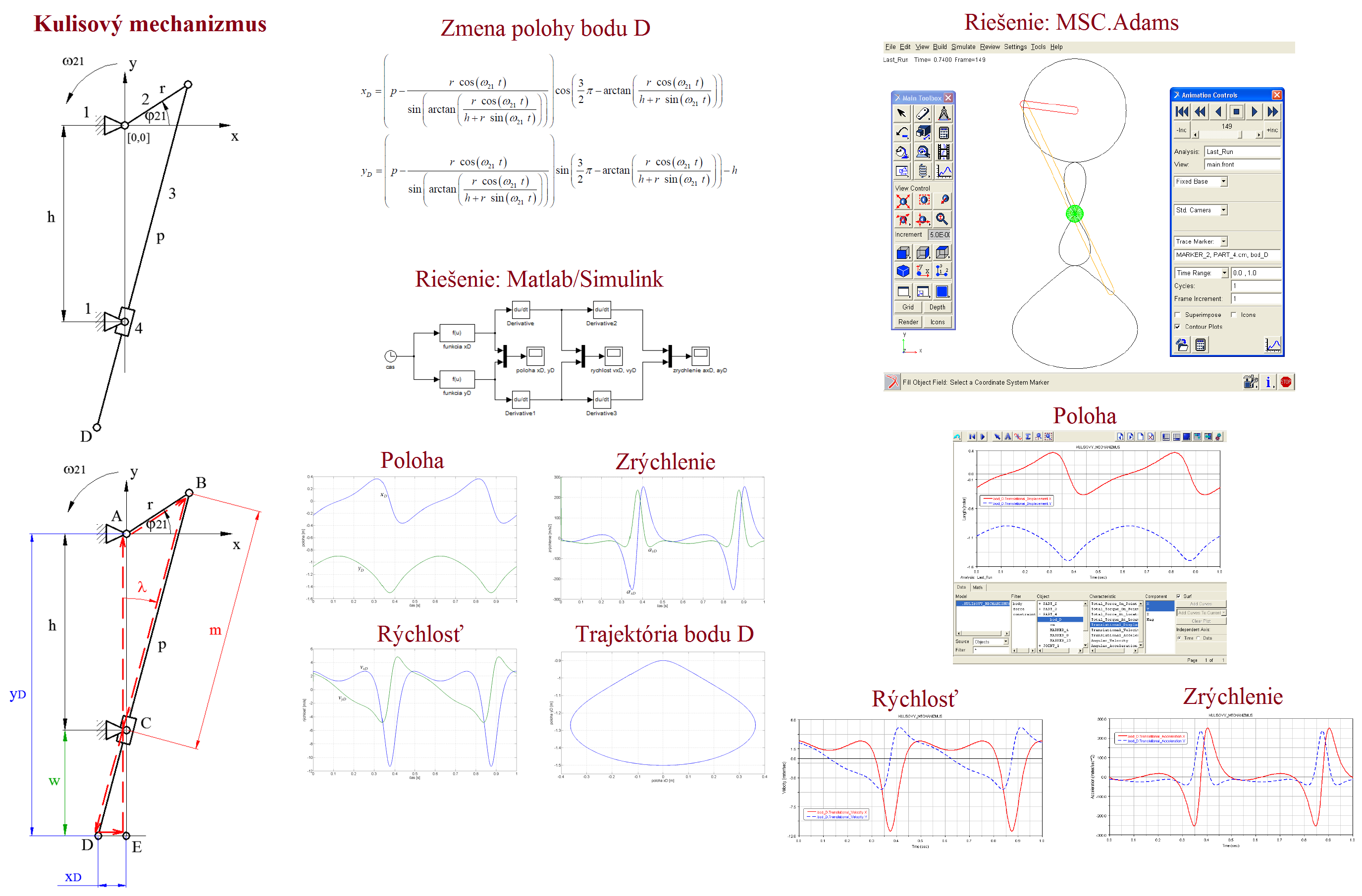
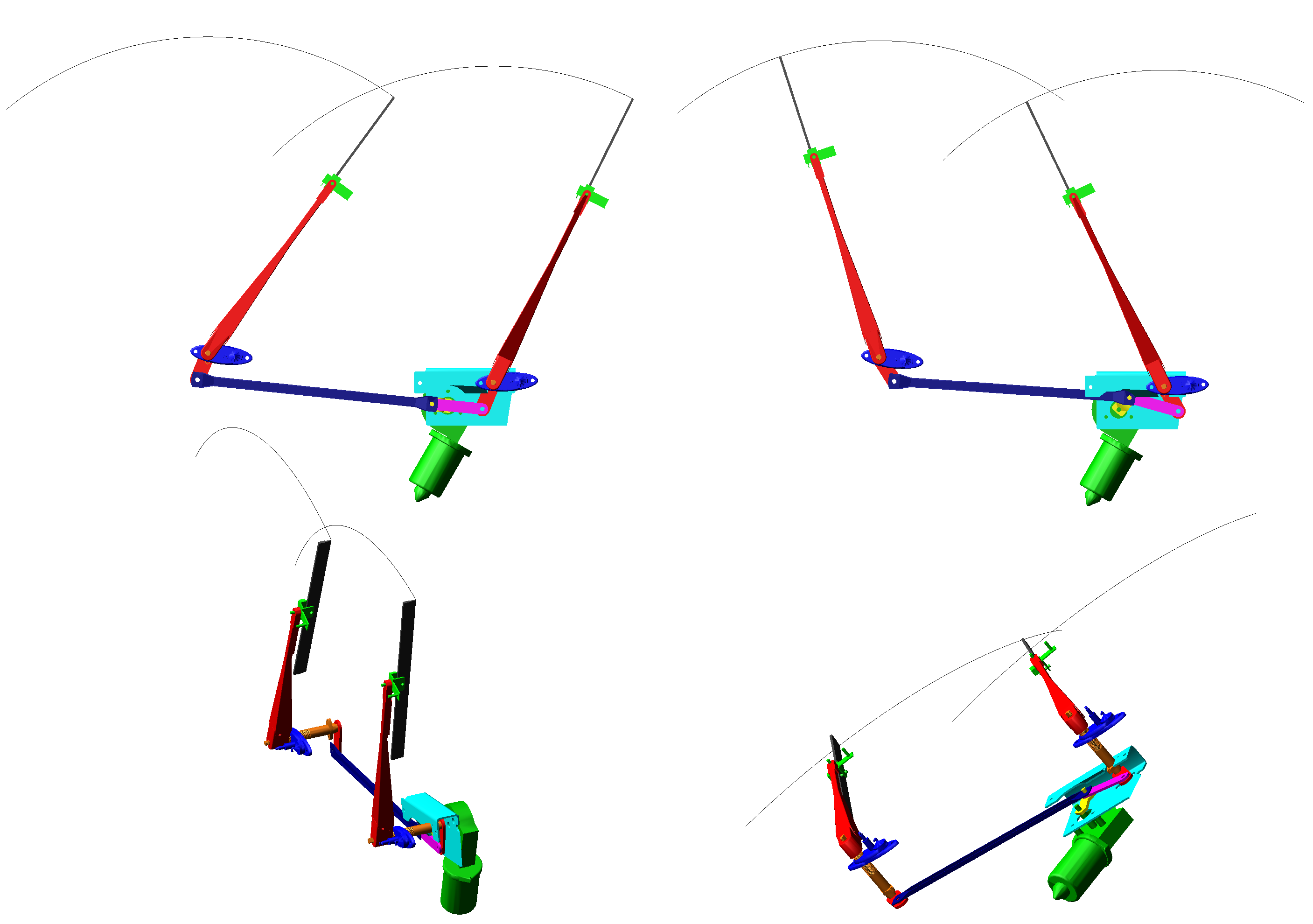
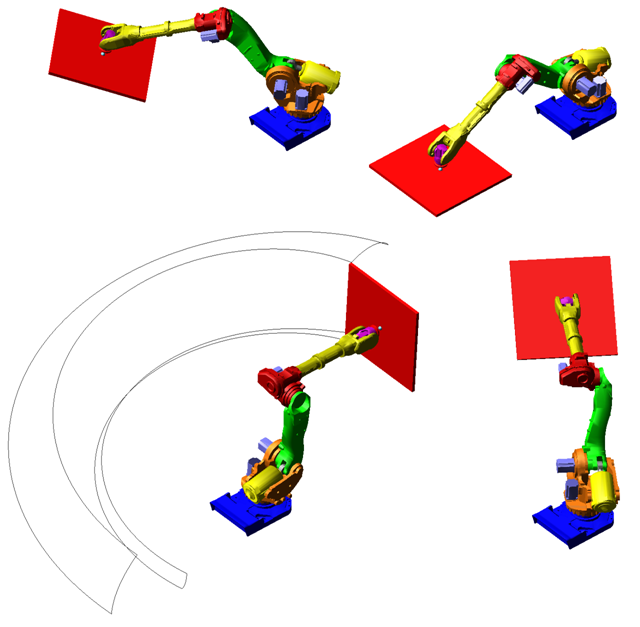
Pri riešení mechanického pohybu sa pre zjednodušenie matematických zápisov uvažuje pohyb dokonale tuhých telies t.j. telies, kltoré sa vplyvom silového pôsobenia nedeformujú, sily majú len posuvný alebo otáčavý účinok na telesá. Spojením viacerých telies geometrickými väzbami vzniká tzv. sústava viazaných telies (mechanizmy), pri ktorých je cieľom vyšetriť pohyb posledného (pracovného) člena mechanizmu vzhľadom na pohyb hnacieho člena mechanizmu.
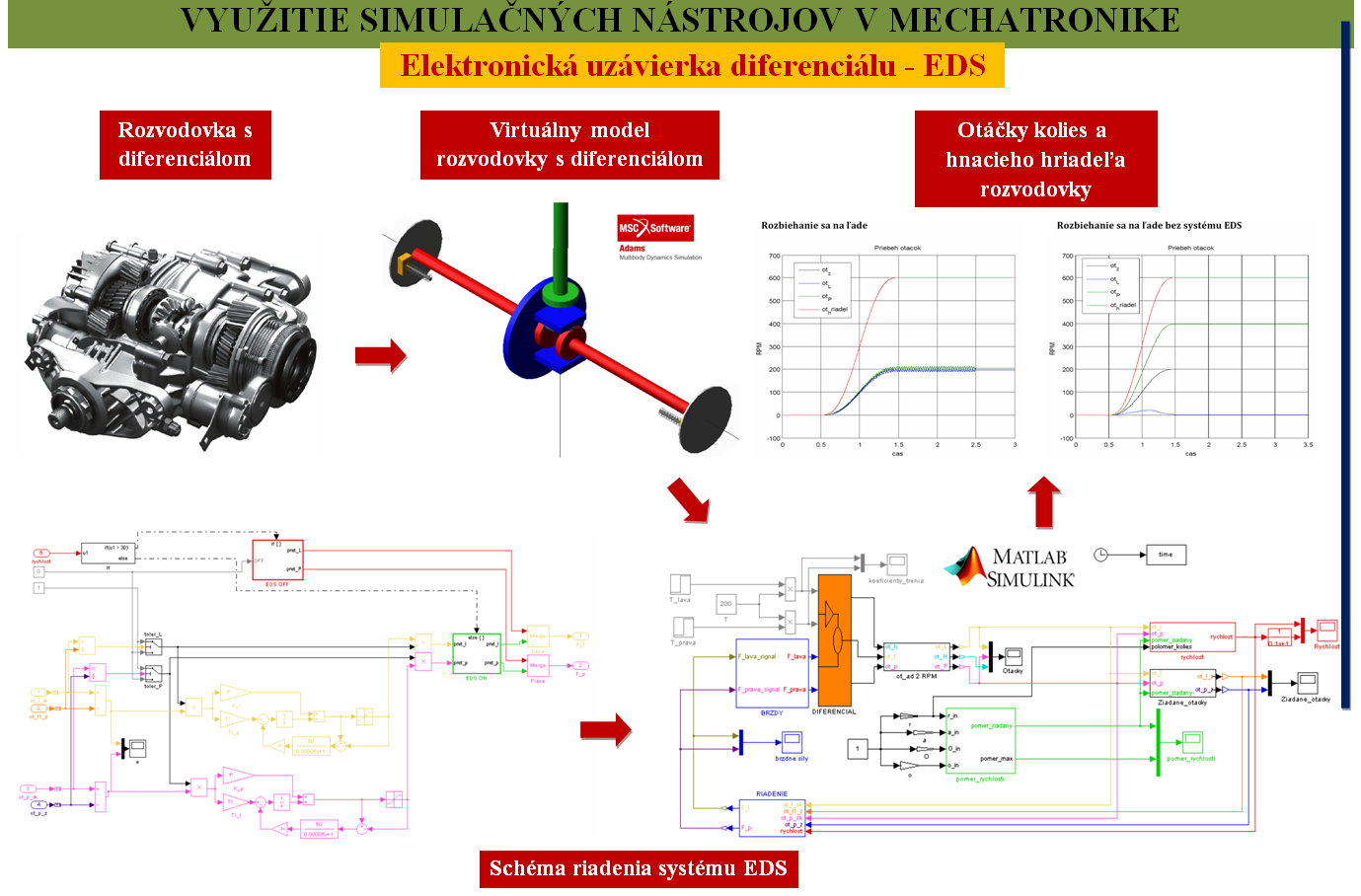
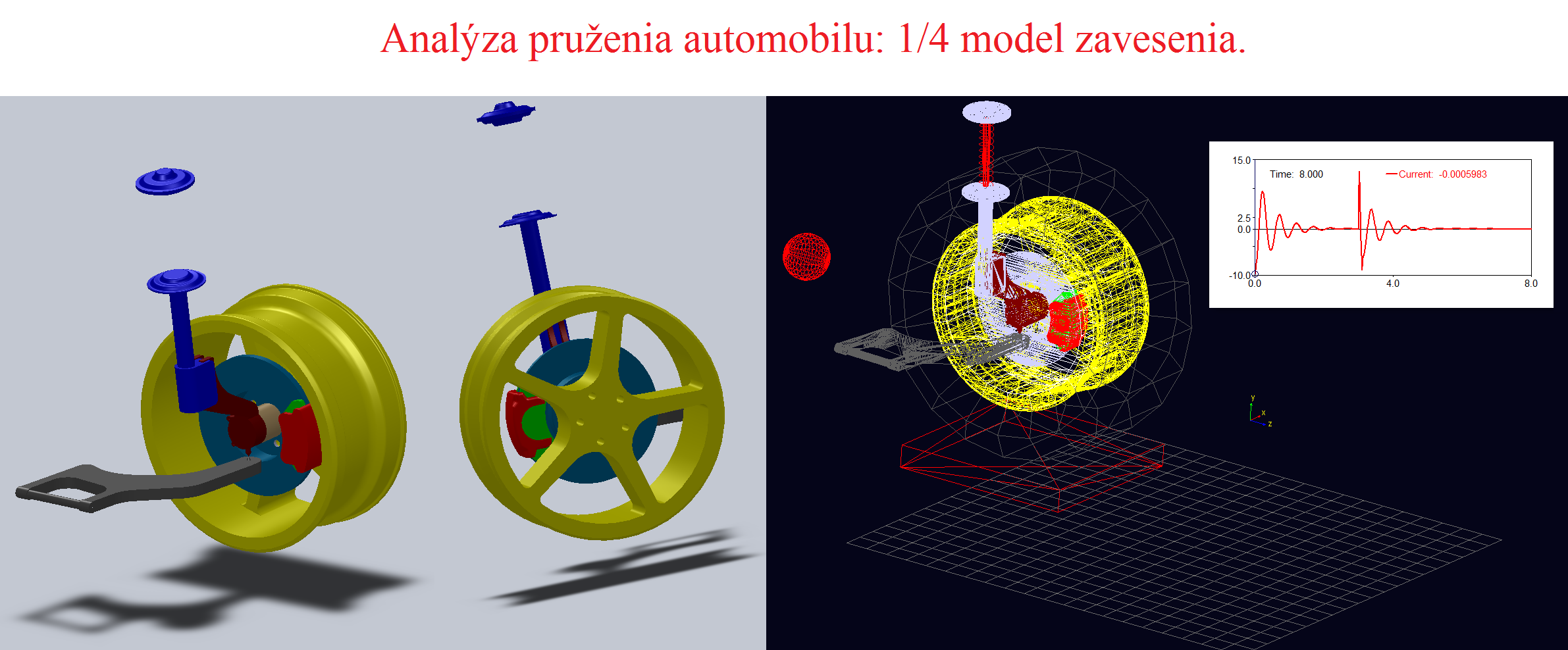
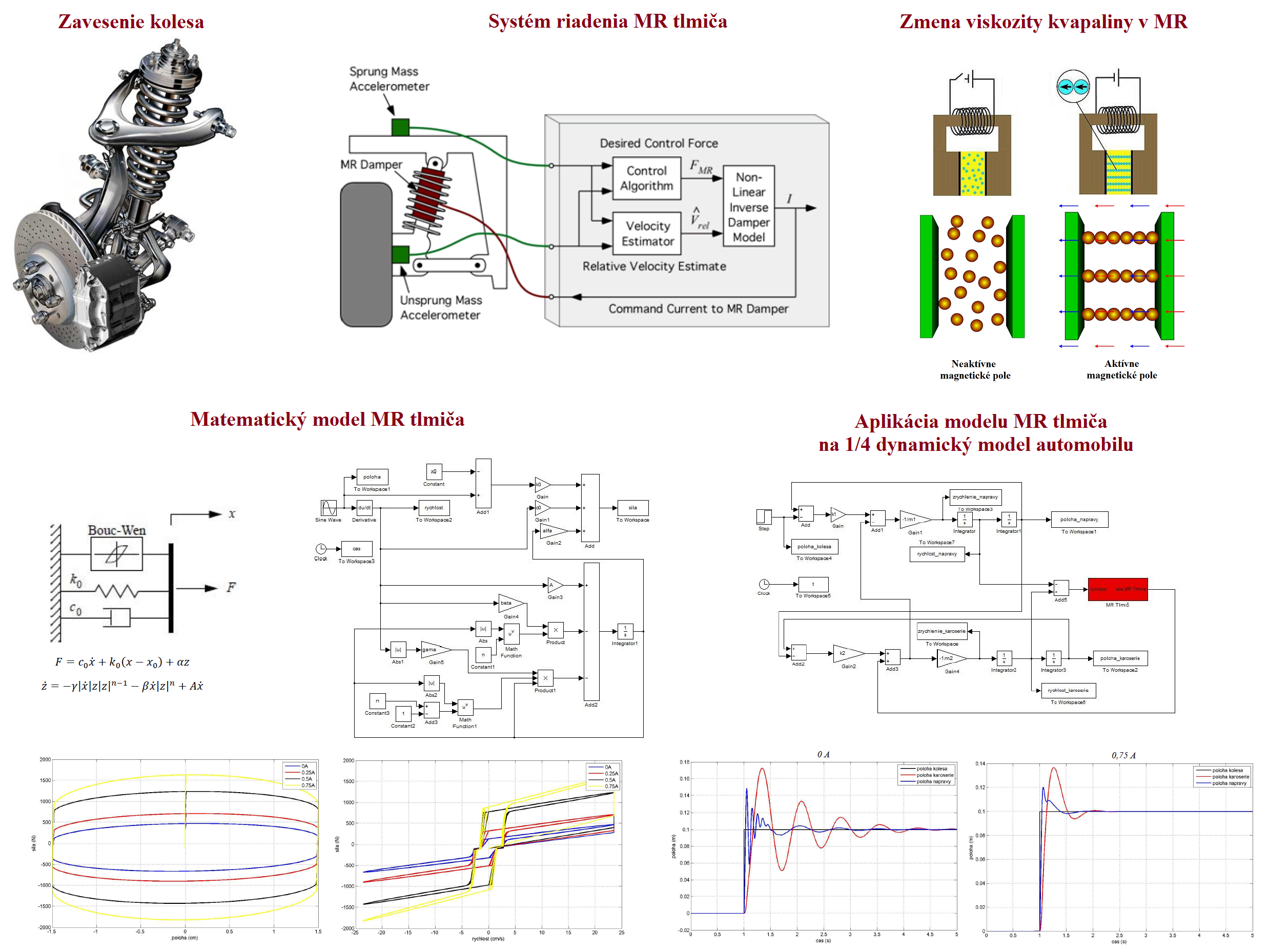
Pohybové rovnice telies zostavené na základe teoretických predpokladov (vektorová a analytická mechanika) predstavujú diferenciálne rovnice. Na riešenie týchto rovníc bude využívaný počítačový program Matlab/Simulink. Iný prístup ponúka program MSC.Adams, v ktorom sa matematický model pohybujúcich telies vytvára pomocou virtuálneho počítačového modelovania. Výhodou je, že odpadá náročné zostavovanie pohybových rovníc, postačujúce sú geometrická modely telies (na zložité geometrie sa využívajú CAD programy), ktoré sa v programe MSC.Adams vzájomne pospájajú geometrickými väzbami, predpíše sa im pohyb alebo silové pôsobenie a program automatický vypočíta pohyb celej sústavy. Modely je možné definovať parametricky, tzn. jednoduchou zmenou parametra možno sledovať odozvu sústavy na jej zmenu. Ďalšou výhodou je, že virtuálene modely z MSC.Adams možno prepojiť s programom Matlab/Simulink, kde sa pre potreby riadenia a regulácie vytvorí príslušná schéma riadenia, čim vznikne komplexný mechatronický systém.
Stručný obsah predmetu:
- kinematika bodu a telesa
- kinematika mechanizmov
- dynamika hmotného bodu a telesa
- vektorová dynamika (Newtonove zákony)
- analytická dynamika (princíp virtuálnych prác, Lagrangeove rovnice II. druhu)
- dynamika sústavy telies
- pasívne odpory (trenie)
- kmitanie lineárnych sústav (s 1 a viac stupňami voľnosti, voľné a vynútené, netlmené a tlmené)
Obsah prednášok: teoretické základy a analytické riešenie úloh.
Obsah cvičení: riešenie úloh v programoch Matlab/Simulink a MSC.Adams.
Odporúčaná literatúra:
- Prednášky
- Juliš, K. – Brepta, R. a kol.: Mechanika I. díl - Statika a kinematika, 1986
- Juliš, K. – Brepta, R. a kol.: Mechanika II. díl – Dynamika, 1986
- Jančina, J., Pekárek, F.: Mechanika II. - Kinematika, 1987
- Medvec, A., Stradiot, J., Záhorec, O., Caban, S.: Mechanika III. – Dynamika, 1996
- Goga, Vladimír: CAE mechatronických systémov. Modelovanie a simulácie v programe MSC.ADAMS : 1. diel: Kinematika, STU Bratislava, ISBN 978-80-227-4054-8, 2013
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}